Rotation and Interior Structure Experiment (RISE)
mission specific
Introduction
InSight’s Rotation and Interior Structure Experiment (RISE) uses the Lander’s X-band radio system in combination with tracking stations of the NASA Deep Space Network to estimate the precession and nutation of Mars in order to provide constraints on the Martian interior structure. The Martian axis of rotation precesses and nutates due to external torques, primarily due to the Sun. The precession rate is a key indicator of the density of the Martian core, while the nutation is sensitive to the state of the core; a fluid core results in a larger nutation amplitude. The Martian precession rate has been estimated earlier from Doppler data taken from the Viking and Mars Pathfinder landers (Folkner et al. 1997a) and from the Mars Exploration Rover (Kuchynka et al. 2014). InSight will provide an improved precession rate and the first detection of the nutation amplitudes by providing observations over one Martian year.
The RISE measurements are the two-way Doppler shift measured at the DSN stations of a radio signal sent by the DSN to InSight where the signal is detected and a coherent signal re-transmitted back to the DSN. Nominally, measurements will be made during one 1-hour tracking pass per week during the Instrument Deployment Phase and four 1-hour tracking passes per week during the Science Monitoring Phase.
Science objectives
The RISE objective are to determine the Martian rate of precession, which is proportional to the polar moment of inertia of Mars, and the amplitude of the semi-annual nutation, which is a function of the polar moment of inertia of the core and the free-core nutation (FCN) rate (Folkner et al. 1997b; Le Maistre et al. 2012). The total and core polar moments of inertia in turn provide constraints on the density, state, and size of the core (Rivoldini et al. 2011).
The RISE measurements are also sensitive to changes in the Martian spin rate, that are driven primarily by seasonal redistribution of CO2 between the atmosphere and the ice caps. These seasonal changes have been detected previously and compared with models (e.g. Konopliv et al. 2011). InSight will be more sensitive to these effects than previous missions. The changes in rotation rate will be determined during the planned data analysis to determine precession and nutation, but are not specific science objectives for InSight.
Instrumentation
As discussed in the Instrument host telecom section, the InSight lander includes an X-band radio system for communication direct-to-Earth. The X-band radio system includes one Small Deep-Space Transponder (SDST), a Solid-State Power Amplifier (SSPA), and two fixed (non-steerable) Medium-Gain Antennas (MGA). The primary purpose of the X-band radio system is for two-way Doppler measurements for RISE, but also serves as a backup to the primary UHF data transmission to the MRO and Odyssey orbiters.
Two-way Doppler measurements are made at the DSN tracking station. The tracking station transmits an uplink signal to Mars at ~7.2 GHz. The uplink signal is received by one of the MGAs. A switch is used to select the appropriate MGA for a given tracking pass based on the time of the pass. The received signal is routed to the SDST that detects the signal and generates a return signal at ~8.4 GHZ that is coherent with the received signal. (The return signal frequency is 880/749 times the uplink frequency.) The signal output to the SDST is amplified by the SSPA and downlinked back to the DSN station. The DSN station measures the frequency of the downlink signal relative to the station clock used to generate the uplink frequency. The resulting Doppler measurement is delivered to the science operations team.
The two fixed MGAs limit the times of day on Mars that Doppler measurements can be made to times that Earth can be viewed within the 40° beamwidth of one of the MGAs. The landing system is designed for a known orientation, with the center of the beam pattern of one MGA pointed 15.5° south of east and the other MGA pointed 6° north of west, both with elevation of 30°. These directions are chosen to have view of Earth at low elevation as seen from the lander, when the sensitivity of the Doppler measurements to direction of the Martian spin axis is largest. The figure below shows the arrangement of the antenna patterns.
A landing error could cause a change in the rotation of the lander about the vertical (azimuth error) of up to 5°. A clockwise rotation as seen from above reduces the number of days that Earth is in view from either antenna, which gives somewhat worse results for RISE, while a counter-clockwise rotation gives better view periods. A tilt in the north or south direction causes negligible change in viewing geometry but can cause reduction in electric power available. A tilt in the east or west direction affects the minimum elevation Earth can be viewed.
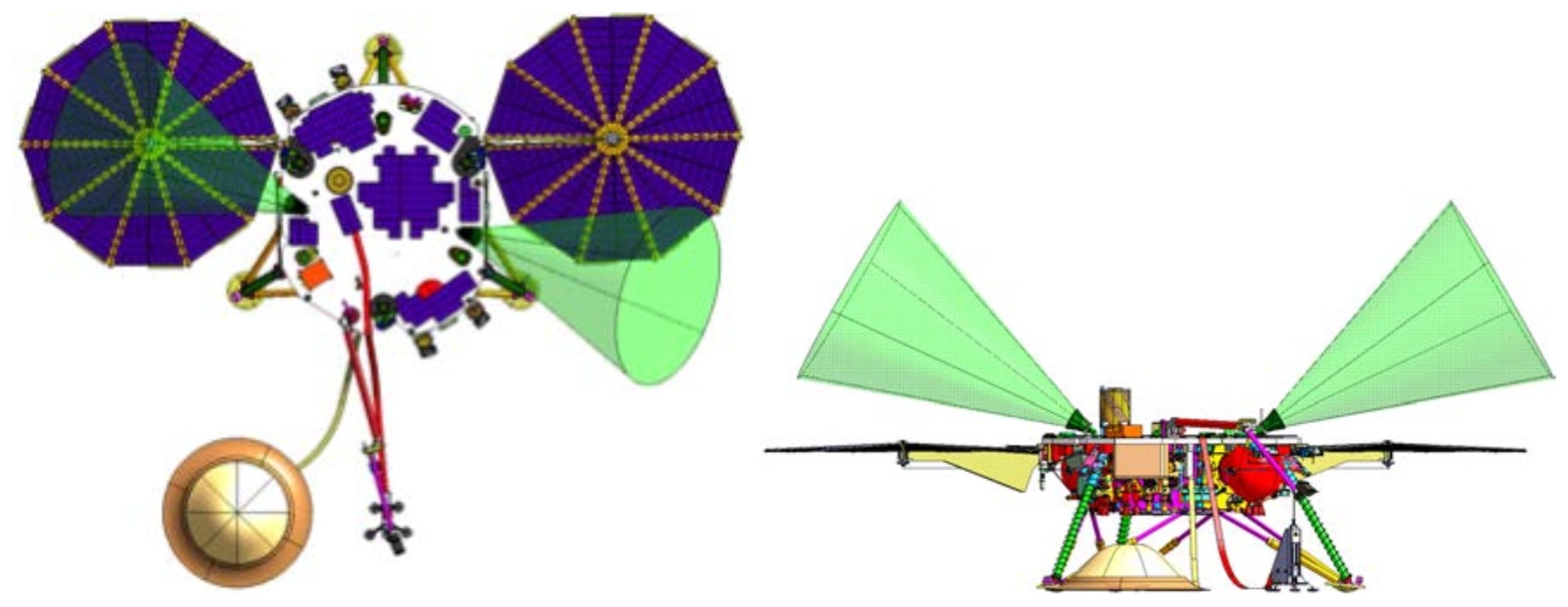
Left: View of lander deployed with solar panels aligned with the east-west axis and the SEIS and HP3 instruments deployed to the south (bottom of figure). The beam patterns of the two MGAs are shown, one pointed 15.5° south of due east, the other pointed 6° north of due west. Right: Lander viewed from the south showing the elevation of the MGA beam patterns centered at 30° in elevation.
The Doppler measurement accuracy for RISE will be limited primarily by fluctuations in the number of electrons between Earth and Mars (solar plasma). The figure below shows the Doppler measurement noise from fluctuations in solar plasma and Earth troposphere as a function of elongation from the Sun (Asmar et al. 2005). Other sources of measurement noise come from fluctuations in the Earth troposophere (also indicated in the figure), from thermal noise in the SDST and DSN receivers, and fluctuations in the phase-lock loop on the SDST. Given the signal-to-noise ratio for worst-case expected uplink and downlink, the thermal noise contribution is expected to be negligible. The phase-locking noise for the SDST transponder has been measured and shown to be well below the noise from troposphere fluctuations.
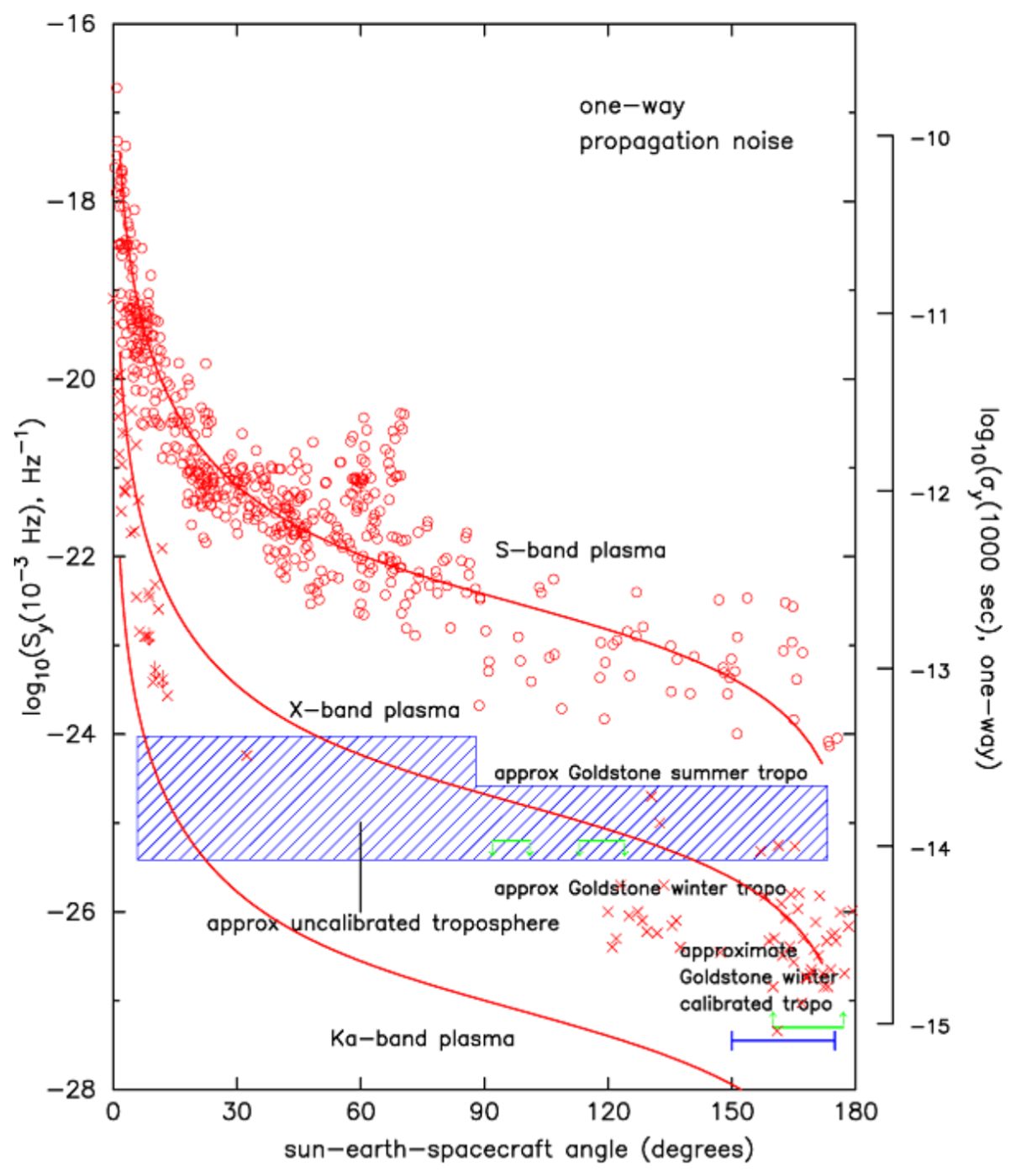
Doppler measurement noise from fluctuations in solar plasma and Earth troposphere as a function of elongation from the Sun (From Asmar et al. 2005).
Operation
Nominally, RISE measurements will be made during one 1-hour tracking pass per week during the Instrument Deployment Phase and four 1-hour tracking passes per week during the Science Monitoring Phase. The tracking pass duration is limited partly by the antenna pattern of the MGAs and partly by the available power and battery energy available on the lander. Dust storms may result in a reduced number of tracks or shorter tracking passes. Simulations show that science return is improved for tracks with elevation of Earth as viewed from the lander as low as possible and when tracking passes alternate between the east-directed MGA and the west-directed MGA. The tracking schedule will be negotiated between the project and the DSN, and adjusted depending on landing errors, dust storms, power availability, and DSN antenna availability.
Calibration
The Doppler measurement noise depends primarily on fluctuations in solar plasma, but also on Earth troposphere and ionosphere fluctuations. The DSN provides estimates of the troposphere and ionosphere during tracking passes based on analysis of GPS signals. These estimates are made available as calibration files to the science teams. On some tracking passes, especially when Mars is near opposition and the solar plasma noise is relatively small, water vapor radiometer data from Advanced Water Vapor Radiometers (AWVR) located at the Goldstone and Madrid DSN sites may be available to provide calibration data at shorter time scales. When available, AWVR calibration data will also be provided to the science team.
see also