Phoenix mission
mission specific
Mission Overview
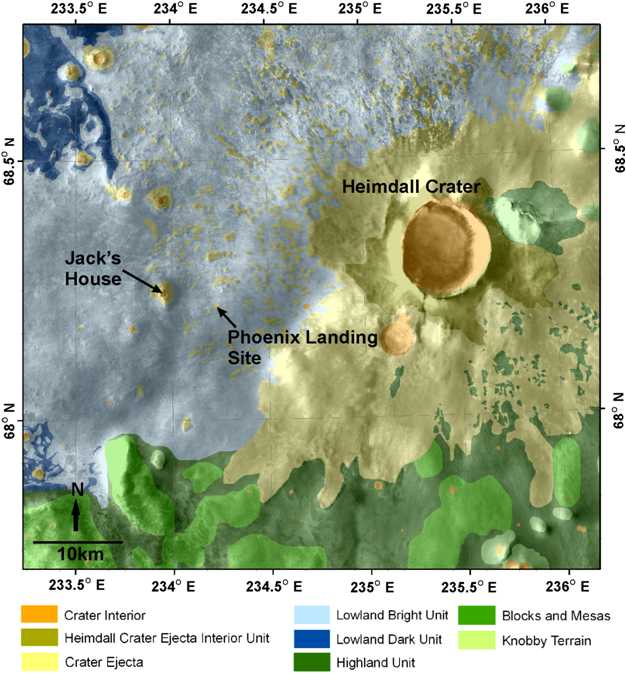
The Phoenix Mission was the first Scout class mission. It consisted of a single lander with associated instrumentation. Phoenix was launched on August 4, 2007 and landed on the northern plains of Mars (68.22 degrees N, 234.25 degrees East Areocentric) on May 25, 2008. The Lander operated until November 2, 2008, performing on the Martian surface for 152 sols (sols are Martian days, 1 sol equaling 24.66 hours). The Phoenix Mission was divided into seven phases: Development, Launch, Cruise, Approach, Entry Descent and Landing (EDL), Characterization, and Surface Phase. The Surface Phase constituted the primary and extended missions, and focused on testing the hypothesis that water ice exists beneath a thin soil cover, evaluating evidence for habitability zones, and monitoring weather during the northern summer. Hence, inferring the presence of water and its interaction with the Martian soil was of crucial importance [SMITHETAL2008].
Mission Phases
DEVELOPMENT
The Development Phase began with the start of mission funding on January 15, 2003. During this phase, the science and technology requirements were developed and analyzed, hardware was constructed and tested, and the spacecraft trajectory and mission operations were determined. The phase was concluded on August 3, 2007 [SMITHETAL2008].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2003-01-15
Mission Phase Stop Time : 2007-08-03
Spacecraft Operations Type : LANDER
LAUNCH
The Phoenix Launch Phase began at the final countdown through spacecraft separation from the upper stage. Phoenix was launched on August 4, 2007, at 926 UTC (526 EDT) from launch complex 17A at Cape Canaveral Air Force Station, Florida. The boost portion of the launch vehicle trajectory took approximately 10 minutes, and was followed by a short coast phase in a parking orbit for approximately 15 minutes. After third stage burnout, the upper stage despun the stack using a yo-yo despin system. Separation of the third stage occurred approximately 36 minutes after launch [SMITHETAL2008].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2007-08-04
Mission Phase Stop Time : 2007-08-04
Spacecraft Operations Type : LANDER
CRUISE
The Phoenix Cruise Phase began soon after separation from the third stage on August 4, 2007, and ended 60 days before entry into the Mars atmosphere, on March 26, 2008. The duration of the cruise phase for Phoenix was approximately 236 days. During this phase, Phoenix performed a number of major activities, including checkout and maintenance of the spacecraft in its flight configuration, the monitoring characterization and calibration of the spacecraft and payload systems, software parameter updates, attitude correction turns, navigation activities for determining and correcting the vehicle's flight path, and preparation for EDL and surface operations, including EDL X-band communication tests. No science investigations were conducted during the cruise phase, excepting instrument health checkouts [SMITHETAL2008].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2007-08-04
Mission Phase Stop Time : 2008-03-26
Spacecraft Operations Type : LANDER
APPROACH
The Approach Phase began on March 26, 2008, 60 days before entry into the Martian atmosphere. This phase was dedicated to the activities necessary to ensure a successful EDL for the spacecraft, which included: acquisition and processing of navigation data to support development of the final trajectory correction maneuvers, and activities leading up to the final turn to the entry attitude and separation from the cruise stage seven minutes before entry. The Approach Phase ended at the atmospheric entry interface point 125 km from the surface of Mars, on May 25, 2008 [SMITHETAL2008].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2008-03-26
Mission Phase Stop Time : 2008-05-25
Spacecraft Operations Type : LANDER
ENTRY, DESCENT, AND LANDING
The EDL phase began immediately following entry into the Martian atmosphere on May 25, 2008, and lasted seven minutes from entry to touchdown. This phase was broken into hypersonic, parachute, and terminal descent subphases, all of which required the spacecraft to be in a different configuration. Terminal descent on Phoenix was accomplished using a pulsed propulsion system, based on the Mars Polar Lander (MPL).
Communications throughout the EDL phase - spanning cruise stage separation through landing plus one minute - were accomplished via UHF relay between Phoenix and the orbiters Mars Odyssey (ODY), Mars Express (MEX), and Mars Reconnaissance Orbiter (MRO). All X-band capability was lost once the cruise stage was jettisoned. During most of EDL, Phoenix used a UHF antenna that wrapped around the backshell to give the Lander a wide field of view (FOV) for communications, which provided the wide spread of off-boresight angles necessitated by the geometry between Phoenix and the orbiters. During terminal descent (approximately 30 seconds before landing), the Lander switched to the landed Helix antenna and continued transmitting a UHF signal until one minute after landing.
After waiting 20 minutes after touchdown for the dust to settle, Phoenix began performing a number of critical activities. These 'sol 0' activities included deployments of the landed solar arrays, the bio-barrier covering the RA, and the SSI and MET masts. The Stereo Surface Imager (SSI) took images of the bio-barrier, solar arrays, and part of the footpad and workspace. High priority EDL and sol 0 data were saved to flash memory within the first hour after touchdown, after which the Lander went to sleep to conserve energy. The Lander woke up for ten minutes for the first post-landed UHF communication pass one MRO orbit period (approximately 2 hours) after landing. After relaying data to the orbiter during that first pass, the Lander went to sleep again. Payload heaters were on continuously from touchdown, with Lander heaters kicking in around midnight for 4-5 hours of keep-alive heating [DESAIETAL2008].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2008-05-25
Mission Phase Stop Time : 2008-05-25
Spacecraft Operations Type : LANDER
CHARACTERIZATION
The Characterization Phase began after the sol 0 activities were completed and lasted for eight Martian sols. During this phase the lander's power, thermal and UHF subsystems were characterized and prepared for operation. The Robotic Arm (RA) system, Surface Stereo Imager (SSI), Microscopy, Electrochemistry, Conductivity Analyzer (MECA), Thermal and Evolved Gas Analyzer (TEGA), and Meteorological Station (MET) instruments were also characterized and prepared. Data collected on sol 0 were relayed to the ground, and the SSI imaged the lander and the surrounding environment. The Robotic Arm was unstowed and completed several practice sample transfers to prepare the Lander equipment for the primary mission [SMITHETAL2008].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2008-05-26
Mission Phase Stop Time : 2008-06-05
Spacecraft Operations Type : LANDER
PRIMARY MISSION (SURFACE PHASE)
The SSI provided high-resolution, stereo, and panoramic images throughout the Phoenix Mission. The SSI served a variety of purposes, including surveying the local geomorphology of the landing site, providing range coordinates for digging operations, and making atmospheric dust and cloud measurements. The SSI included two cameras that allowed for the capture of three-dimensional views of the landing site. Multispectral filters enabled imaging at 12 wavelengths (0.4 to 1.0 micrometers) of geological and atmospheric phenomena [LEMMONETAL2008].
The Robotic Arm (RA) was successfully deployed and declared operational on sol 1 and operated through sol 149. A detailed map of the surrounding local geomorphology provided by the SSI allowed for the specification of range coordinates to the RA for digging operations. The RA and the associated Icy Soil Acquisition Device (ISAD) excavated and delivered samples to the Microscopy, Electrochemistry, and Conductivity Analyzer (MECA) and the Thermal Evolved Gas Analyzer (TEGA). The Robotic Arm Camera (RAC) was attached above the RA scoop and provided close-up, full-color images of various objects of interest in the area immediately surrounding the lander, including prospective soil and water ice samples in trenches dug by the RA, verification of collected samples in the scoop prior to analysis by MECA and TEGA, and the floor and side-walls of the trench to examine fine-scale texturing and layering [KELLERETAL2008].
MECA was responsible for the analysis of soil samples in accordance with the Surface Mission objectives, and consisted of onboard instruments such as the Wet Chemistry Laboratory (WCL), Optical Microscopy (OM)/Atomic Force Microscopy (AFM), and the Thermal and Electrical Conductivity Probe (TECP).
WCL performed chemical analyses on three Martian soil samples. One soil sample was obtained from the top ~2 cm of soil and two were obtained at ~5 cm depth from the icy soil interface. When mixed with water in a ~1.25 soil to solution ratio (by volume), a portion of the soil components solvated. Ion concentrations were measured using an array of ion selective electrodes. Solution conductivity was measured using a conductivity cell [KOUNAVESETAL2009].
Nine soil samples were successfully delivered to the OM/AFM for detailed microscopic examination [SMITHETAL2009].
The TECP was located on the RA and measured the temperature, thermal conductivity, and volumetric heat capacity of the soil. It also detected and quantified the population of mobile H2O molecules in the soil, by measuring the electrical conductivity as well as the dielectric permittivity. TECP measured atmospheric H2O vapor abundance and augmented the wind velocity measurements from the meteorology instrumentation. TECP was mounted near the end of the RA and could be placed either in the soil or held aloft in the atmosphere [ZENTETAL2009].
TEGA consisted of two separate components: a Differential Scanning Calorimeter (DSC) and an Evolved Gas Analyzer (EGA) and was a derivative of the instrument flown on the Mars Polar Lander [BOYNTONETAL2009]. Samples delivered to TEGA by the RA were heated in ovens to temperatures up to 950 deg C. Water and carbon dioxide released during the heating were analyzed in the EGA. The power required by the sample oven was continuously monitored during the heating and compared to that required to heat a similar, but empty, oven. The power difference was the output of the DSC. Both endothermic and exothermic phase transitions could be detected, and were used to identify the phases present. By correlating the gas release with the calorimetry, the abundance of the volatile compounds associated with the different phases was determined [SMITHETAL2009], [BOYNTONETAL2009].
A dozen trenches were excavated at the Phoenix landing site and 31 samples were acquired for delivery to instruments on the Lander: six to WCL, nine to OM/AFM, and seven to TEGA. Several rocks were also moved to examine the underlying material. Samples delivered to TEGA, OM/AFM, and WCL revealed that the Martian soil consists of an approximately 3 cm deep surface layer of cloddy material above an underlying icy soil substrate. Soil samples deposited via the sprinkle technique indicated that the soil clods were weakly cohesive [ARVIDSONETAL2009], [SMITHETAL2009].
The Meteorological Package (MET) consisted of three temperature sensors, one pressure sensor, and the lidar system. Temperature was measured by three temperature sensors fixed to the weather station mast. These sensors measured temperature by monitoring its effect on an electrical current through a closed circuit. Pressure was monitored throughout each sol by a pressure sensor located on the deck of the lander [TAYLORETAL2008].
The lidar system measured the height profile of backscattered laser light from airborne dust and clouds. The system consisted of a rapid-pulse laser and an optical telescope. The lidar's laser shot rapid pulses of light into the atmosphere, which were reflected off airborne particles back to the optical telescope, allowing the composition, movement, and size of clouds and particles above the lander to be determined. These data were coordinated with solar radiation measurements and in situ sampling to study the climate and the water cycle [WHITEWAYETAL2008]. The SSI also captured movies of the Telltale wind indicator, providing additional information on wind velocity and direction [MOORESETAL2010].
Spacecraft Id : PHX
Target Name : MARS
Mission Phase Start Time : 2008-06-05
Mission Phase Stop Time : 2008-11-02
Spacecraft Operations Type : LANDER
Mission Objectives Summary
MISSION OBJECTIVES OVERVIEW
The Phoenix mission was closely aligned with the Mars Exploration Program objective of determining the degree to which Mars provided conditions critical for formation and preservation of prebiotic compounds and whether life started and evolved. Consequently determining the presence of water and its interaction with crustal materials was of fundamental importance. The four primary science objectives were tailored to investigate the history of water in all forms on Mars, as well as the biological potential of the soil-ice boundary. The four primary science goals were: (1) To study the history of the ground-ice and its emplacement mechanisms, (2) To address the effect that subsurface ice has on the local surface geomorphology, (3) To characterize the climate and local weather of the landing site, and (4) To address the habitability of the icy soil [SMITHETAL2009].