![]() Thermal and Electrical Conductivity (MECA TECP)
Thermal and Electrical Conductivity (MECA TECP)
| |
|
|
Previous Next |
|
See also See also
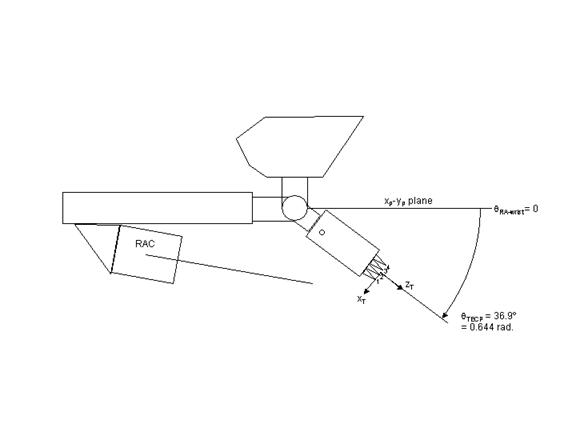
An end-effector on the Phoenix Robotic Arm (figure 1), the TECP is a probe of soil physical properties including temperature, thermal conductivity and diffusivity, electrical conductivity and permittivity, as well as atmospheric temperature, humidity, and wind speed. These measurements are made with four conical needles, three of which contain electrical heaters and thermometers, and a hygrometer sensor mounted separately in the body of the TECP.
Three of the four parallel needles contain a thermocouple and a heater. The two needle pairs are used as electrodes for regolith electrical properties measurements. The same needles also serve as heating elements and thermometers for regolith thermal properties and wind speed measurements. The needles can be inserted into the soil for thermal and electrical measurements or positioned above the surface for atmospheric temperature, and wind speed measurements. Regolith thermal properties (including temperature, thermal conductivity, thermal diffusivity, volumetric heat capacity, and thermal inertia) as well as wind speed are derived from the heating and cooling behavior of the needles before and after a known amount of heat is added. Regolith electrical properties, including electrical conductivity and dielectric permittivity, are measured with capacitance and resistance sensors coupled to the regolith through the sensing needles. Atmospheric water vapor concentration is measured with a calibrated capacitance hygrometer mounted near a temperature sensor on the TECP printed circuit board, but exposed to the atmosphere through a particulate filter.
The humidity sensor determines the capacitance of the thin film hygrometer, which is a calibrated function of the relative humidity at the film surface. By measuring the film temperature with the adjacent temperature sensor, the result can be converted to absolute humidity. Under the assumption that gradients in vapor pressure are small, external relative humidity can be determined by comparison of the TECP result with the MET temperature sensors.
The scientific objectives of the TECP are:
Figure 1. Top: Schematic of TECP position on the RA. See description of RA encoder joint angles in TECP_SAMPLE.FMT. Bottom: TECP (right) mounted on the robot
TECP thermal and electrical properties measurement quality depends on proper needle placement by the RA. Non-linear insertion, partial insertion, and lateral movement all affect data quality negatively. Thermal properties measurements can also be negatively impacted by non steady state thermal conditions, and the TECP should therefore be allowed to equilibrate to its thermal environment before making thermal properties measurements.
Measurement electronics are contained in the body of the TECP, and include a 12 bit A/D converter, two phase detectors, three resistance bridges, and a digital shift register. The A/D converter and shift register communicate through a serial interface to an FPGA on the primary MECA control and measurement electronics (CME) board.
Source: MECA Non-Imaging EDR SIS |